沁峰機(jī)器人
Industrial robot
機(jī)器人系列
Product series
二/三次元機(jī)械手
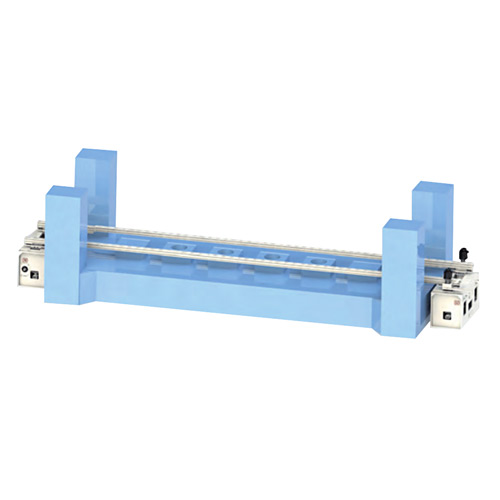
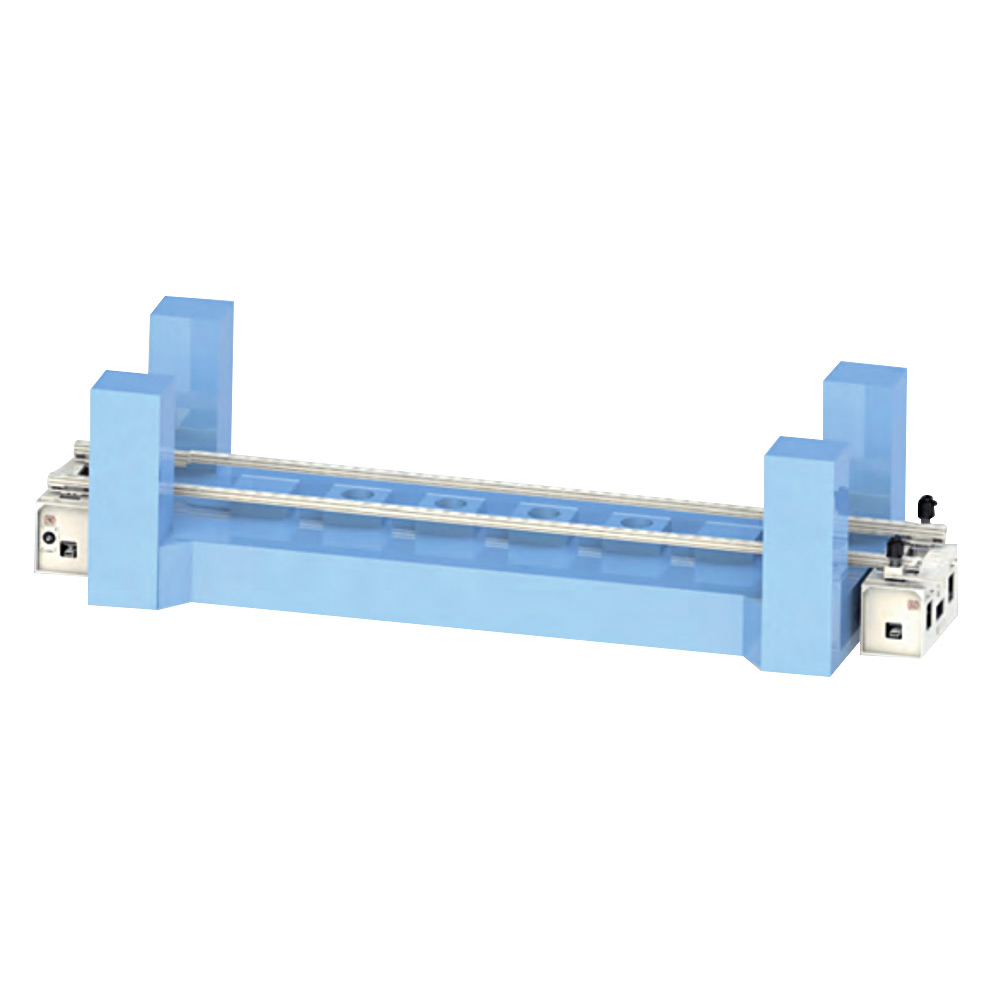
單機(jī)多工程機(jī)械手QF-D系列
此種機(jī)械手可將單臺(tái)沖床上放置的多副模具連接成自動(dòng)化生產(chǎn)線,即機(jī)械手臂于模具內(nèi)將沖壓工件在模具間進(jìn)行精密定位移送;這樣就淘汰了傳統(tǒng)人工搬送模式,提高了生產(chǎn)效率,避免人工參與生產(chǎn)所產(chǎn)生的各種因素(包括效率慢、危險(xiǎn)、誤操作等)。一般由單臺(tái)沖床(客戶自備)+上料機(jī)(卷料機(jī)或片料機(jī))1臺(tái)+單機(jī)多工程式機(jī)械手1條+輸送帶1條(客戶自備)組成。
機(jī)械手運(yùn)動(dòng)軌跡為兩坐標(biāo)(兩軸),即左右移送方向和上下舉升方向。驅(qū)動(dòng)為2臺(tái)日本進(jìn)口三菱服電機(jī)軟件也為三菱控制系統(tǒng)。拿取方式采用真空、電磁吸盤或夾爪方式,每個(gè)手臂上都裝有傳感器檢測(cè)裝置傳感器信號(hào)傳輸采用光纖方式,速度快、壽命長(zhǎng),不會(huì)被其他介質(zhì)干擾,準(zhǔn)確率高,重復(fù)定位精度為+0.2mm;操作面盤配屬有LCD人機(jī)界面(MMI).監(jiān)控操作狀態(tài)容易。
適用范圍廣泛,如電腦、TFT-LCD監(jiān)視器、電子、家電、汽車、摩托車等各種飯金沖壓件。
全國(guó)服務(wù)熱線:
400-166-2658
電子郵箱:sales@qinfeng-gp.com
官方網(wǎng)站:www.hnlbjxs.com
| 型號(hào) | QF-D200 | QF-D300 | OF-D450 | QF-D600 | QF-D900 | |||||||
| 移動(dòng)行程 (X軸) | 200mm | 300mm | 450mm | 600mm | 900mm | |||||||
| 移送精度 | ±0.2mm | ±0.2mn | ±0.2mm | ±0.2mm | ±0.2mm | |||||||
| 舉升行程 (Z軸) | 30-60mm | 30-60mm | 30-60mm | 30-60mm | 30-60mm | |||||||
| 取料方式 | 真空吸盤/電吸盤/夾爪 | |||||||||||
| 適用驅(qū)動(dòng) | 三菱伺服驅(qū)動(dòng) | |||||||||||
與機(jī)床、模具配合參數(shù):
| 序號(hào) | A | B | C | D | ||||||||
| 名稱 | 最大模貝長(zhǎng)度 | 最大產(chǎn)品長(zhǎng)度 | 最小模具凈開口 | 機(jī)械手最小通過(guò)空間 | 最小下模具高度 | |||||||
| 說(shuō)明 | 大于180mm | 大于90mm | 大于200mm | |||||||||
| 備注 | 機(jī)械手通過(guò)的空間 | 喉深減上滑塊寬度/2 | 太低時(shí)傳動(dòng)軸與臺(tái)面王涉 | |||||||||
| 序號(hào) | G | H | X | I | ||||||||
| 名稱 | 模具避讓機(jī)械手空間 | 機(jī)械手垂直行程 | 機(jī)械手水平行程 | 最大產(chǎn)品長(zhǎng)度 | ||||||||
| 說(shuō)明 | 大手120mm | 60 -80mm選 | 約等于A+B | 小于650mm | ||||||||
| 備注 | ||||||||||||
注釋
1.移動(dòng)產(chǎn)品重量最大5KG
2.拿取方式吸盤/電磁或夾爪
3.效率=沖床-行程時(shí)間+機(jī)械手-行程時(shí)間